Design
par
Bill Vorn
Montréal (Québec) Canada
© 2003
Dessin de circuit, électronique, programmation par
Martin Peach
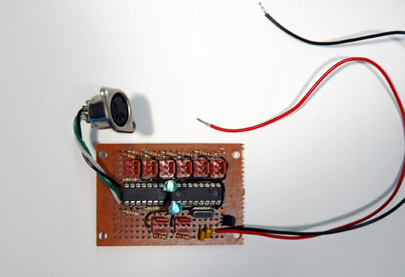
| Interface de contrôle des servo-moteurs RC |
Design par
Bill Vorn
Montréal (Québec) Canada
© 2003Dessin de circuit, électronique, programmation par
Martin Peach
| Description |
|
| Fiche technique |
|
6.5
(L) x 4.5(P) cm |
|
Projets | Robographie | Expositions | Recherche | Bio | Contact | Liens ©
Bill Vorn 2014
|